Connor Lee
I’m currently at Google Labs working at the intersection of computer vision, machine learning, and controls for Project Starline.
I completed my Ph.D at the California Institute of Technology, where I specialized in computer vision for robot localization and semantic perception in the Autonomous Robotics and Controls Laboratory.
I’ve also spent time at Google AR (motion tracking for augmented reality devices), at Apple (self-supervised learning for Siri Visual Intelligence), and at Microsoft (identity and secure access). I earned my B.S. in Computer Science from Caltech.
News
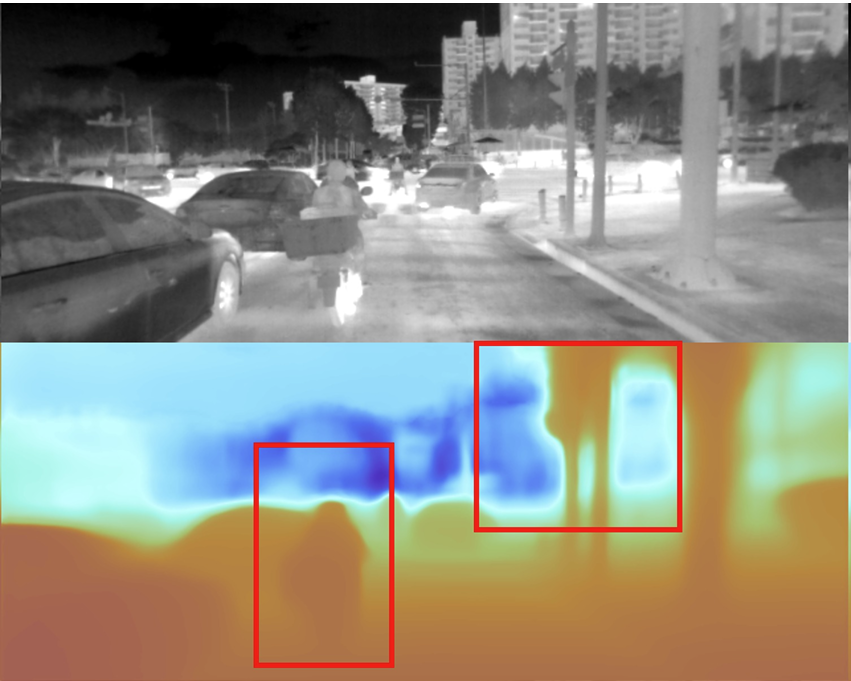
| Jan 30, 2025 | Our paper, MonoTher-Depth: Enhancing Thermal Depth Estimation via Confidence-Aware Distillation, has been accepted for publication in IEEE Robotics and Automation Letters. |
|---|---|
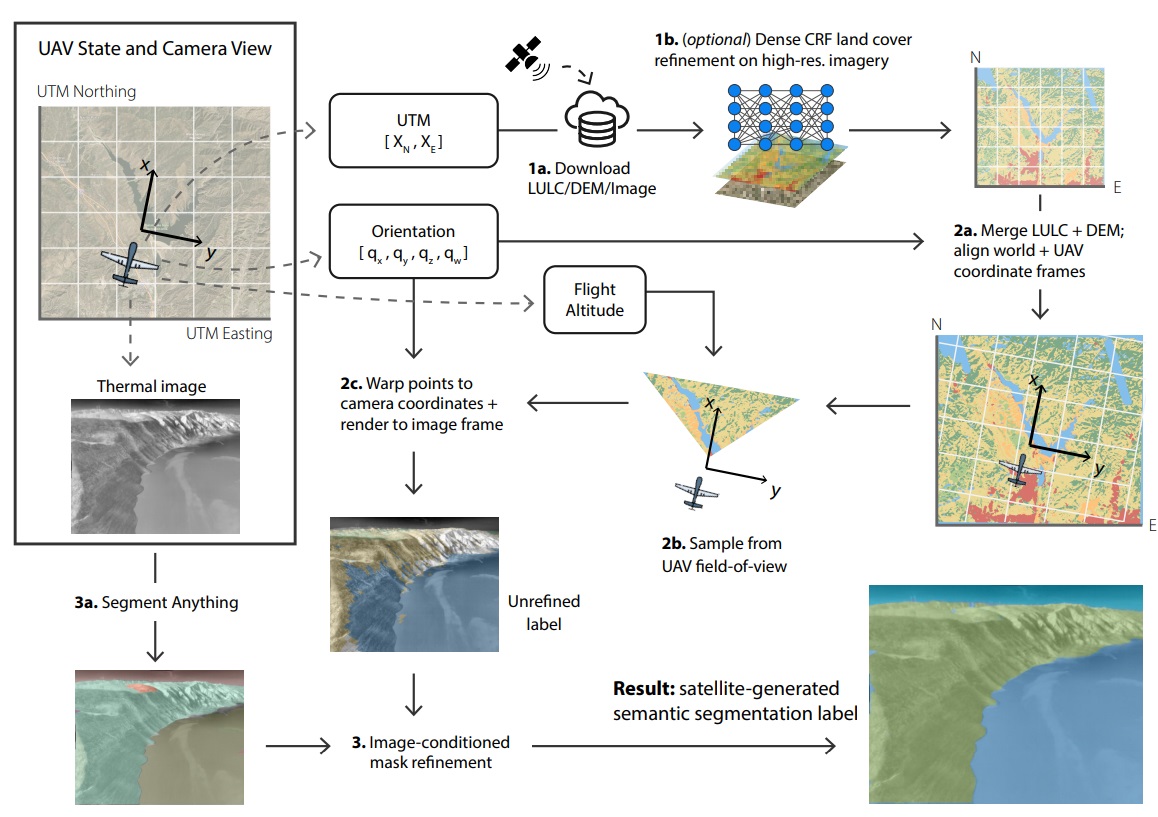
| Mar 23, 2024 | New paper describing our fast and free method for generating semantic segmentation annotations for aerial imagery using satellite land cover data and visual foundation models. |
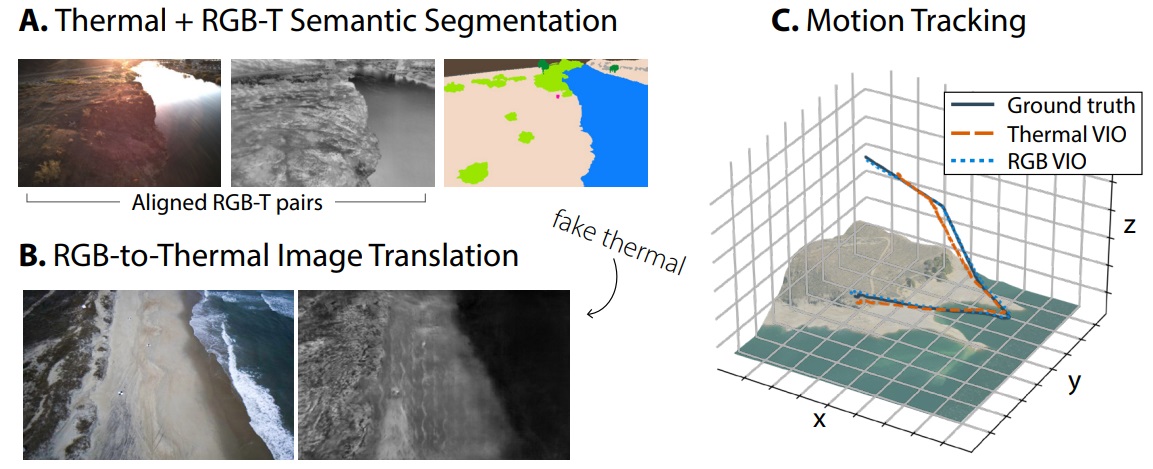
| Mar 19, 2024 | Released a new RGB-thermal dataset, CART, which is the first RGB-T dataset created for aerial field robotic perception algorithms in natural environments. |